☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
MAE 241 –Statics Fall 2006 Jacky C. Prucz
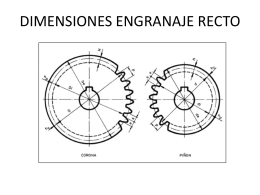
DIMENSIONES ENGRANAJE RECTO
MAE 241 –Statics Fall 2006 Jacky C. Prucz
Introducción a la Fe Cristiana
Diapositiva 1 - OAS :: Department of Conferences and
MAE 241 –Statics Fall 2006 Jacky C. Prucz
Programa de Trabajo Social Escolar
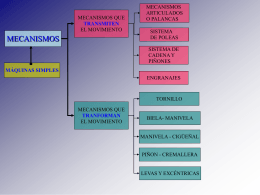
Mecanismos 2 - WEB TECNOLOGIA ESTUARIA
MAE 241 –Statics Fall 2006 Jacky C. Prucz
CLASES DE MÁQUINAS SIMPLES
Diapositiva 1 - tecnologiaindustrialuno
MAE 241 –Statics Fall 2006 Jacky C. Prucz
EL SISTEMA INTERAMERICANO DE DERECHOS …
Document