☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Project “RedEye” - UCF Department of EECS
ECE 329 Homework 11 Due: Tuesday November 10, 2015, Noon
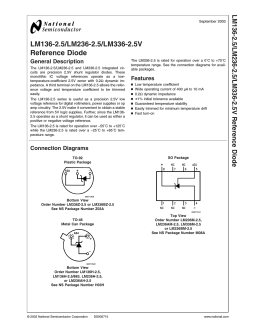
LM136-2.5/LM236-2.5/LM336
Chapter 2 Fundamentals of Data and Signals
Railway Foundation - Sheffield Hallam University
Laser Milling Machine - UCF Department of EECS
Presentation - NIA - Elizabeth City State University
Presentación de PowerPoint
Charles Townes - Henry Samueli School of Engineering
AVO PowerPoint template Release 2.0
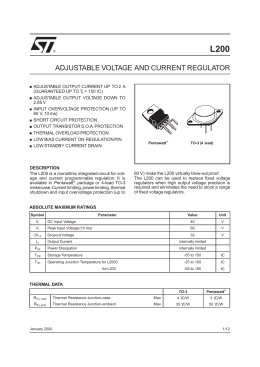
L200
Introduction to Global Positioning Systems
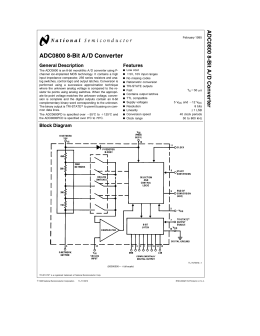
ADC0800 8-Bit A/D Converter
IC NOTES PPT - Mohan - electronics hobby | This Web …
SPIRIT-C Solar Powered Image Response Infrared Tracking
Slide 1
WOUND COMPONENT EST ANALYZER MODEL 19036
Solum certum nihil esse certi”
AutoGait: A Mobile Platform that Accurately Estimates …
Introducción a los Láseres
Performance Standards
No Slide Title
Informal Logic