☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Diapositiva 1
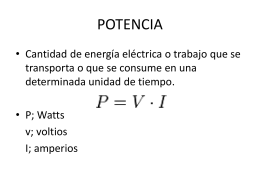
MOTORES DE CORRIENTE
POTENCIA TRIFÁSICA
NMM Comprensión La Ardilla Jorgelina
File
Rotores de helicopteros
nivelación grado 11
NMM Comprensión La Ardilla Jorgelina
NMM Comprensión La Ardilla Jorgelina
Tecnologías de la Nueva Era
MÁQUINAS SINCRÓNICAS
Desarrollo Local La importancia de su promoción
motores de ca – asïncronos - Ing. Jorge Cosco Grimaney
Reproducción en Ardillas
LA ENERGÍA - I.E.S. Tiempos Modernos
Unidad V Electromagnetismo.
Grupo2_Maquinas-Presente_El-Carro
literatura gris y motores de búsqueda
exposición3
Motores de búsqueda
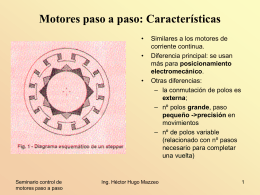
Motores paso a paso Características
La jaula estaba terminada. Baltazar la colgó y cuando acabó de