☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Forma a partir de la sombra Shape from shading
We shape our tools and thereafter our tools shape us
Luz e Iluminación
opartes del microscopio compuesto
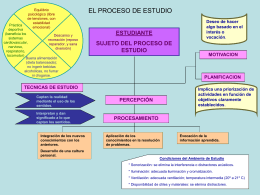
EL PROCESO DE ESTUDIO - ALUMNOS FISI
Tipos de Iluminación
Diapositiva 1
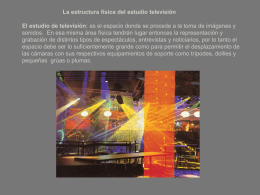
La estructura física del estudio televisión El
Presentación de PowerPoint
RIESGOS LABORALES INFORMÁTICA
File