☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Introduccion al reconocimiento de formas
SIMULACIÓN CON EL SOFTWARE ARENA
Isabel Allende
unidad popular(gobierno de allende)
mrpeto.files.wordpress.com
Slide 1
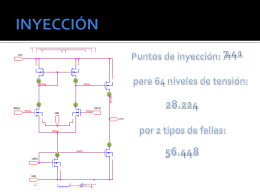
Inyección de fallas en estructuras analógicas CMOS
Slide 1
Presentado en informatica - informaticaeducativaunah-vs
reflexionespowerpoint.com
Yellow