☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
CAPITULO 3 Buses del Sistema
Vista de Alto Nivel del Funcionamiento del Computador
PRESENTATION NAME
Sitios de la ciudad
CRC - ejemplo
Diapositiva 1
Componentes de la computadora y su funcionamiento
En la escuela…
Entradas FF Sincrónicas y Asincrónicas
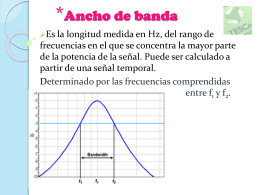
Ancho de banda - 7421MARZO
Capitulo 4 Vocabulario