☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Transferencia de Piezas.
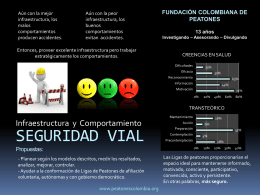
SEGURIDAD VIAL
Árbol de problemas y encuesta
Diapositiva 1
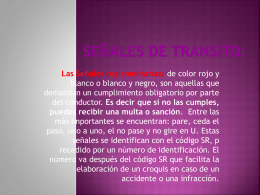
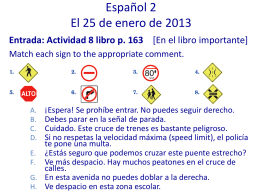
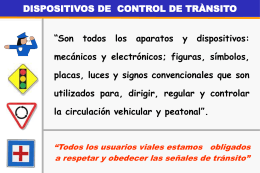
Señales de transito
Sin título de diapositiva - Básculas Industriales Ballesteros SA de CV
Diapositiva 1
Conductores – recomendaciones
SICEpark
Spanish 1– 8/27
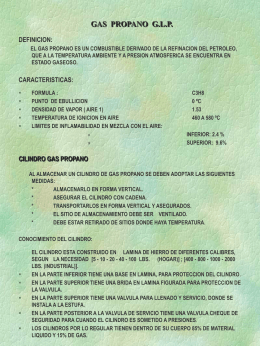
GAS PROPANO
Neumática e Hidráulica
Presentación de PowerPoint
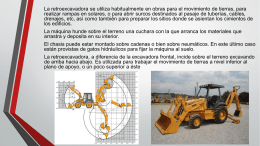
MAQUINARIA PESADA - Técnicas en la Construcción
Señales de Tránsito 3
Técnicas Para Pesar
VOLUMEN DE CUERPOS GEOMÉTRICOS
Presentación de PowerPoint
CUERPOS DE REVOLUCIÓN - IES Juan de la Cierva
CIRCUITOS NEUMÁTICOS
File - Presentación
cómo obtener la resonancia de una botella objetivo
Passos de vianants