☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Deportes
Document
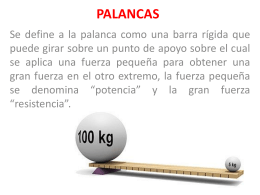
PALANCAS - WordPress.com
Palancas
Historia de las Palancas
palanca - WordPress.com
Transmisión lineal: PALANCA
Diapositiva 1
palanca - WordPress.com
Las máquinas:la bicicleta
PALANCAS MUSCULARES - IHMC Public Cmaps (3)
CLASES DE MÁQUINAS SIMPLES
Presentación de PowerPoint
Diapositiva 1