☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
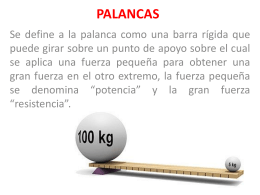
Palancas
PALANCAS - WordPress.com
Diapositiva 1
Mecánica del movimiento
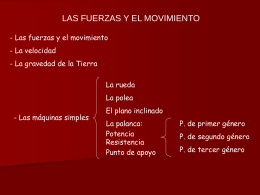
CLASES DE MÁQUINAS SIMPLES
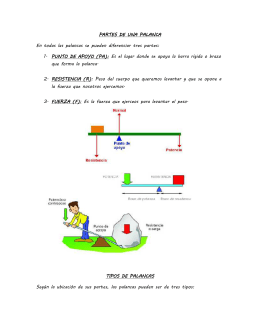
PARTES DE UNA PALANCA En todas las palancas se pueden
MECANISMOS - 3ESO201011
Las máquinas:la bicicleta
Historia de las Palancas
palanca - WordPress.com
Presentación de PowerPoint
maquinas-y-herramientas1
Transmisión lineal: PALANCA
Como funcionan las cosas hecho
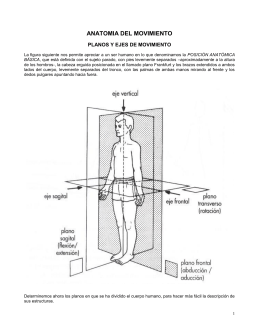
PLANOS Y EJES DE MOVIMIENTO
Diapositiva 1
palanca - WordPress.com
Palanca de Primer grado, Palanca de Segundo grado y Palanca de
Descargar webquest de palancas.
TMT 2515 CR-700310ES
Document
Aplicación de las Palancas en la Vida Diaria (Marzo 2011)
Diapositiva 1