☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Kein Folientitel
Kein Folientitel
Kein Folientitel
Document
Arquitectura Harvard
Arquitectura
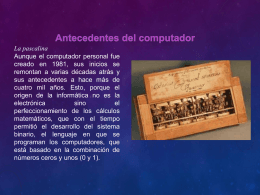
Antecedentes del computador
control de proyectos basado en computadores de mano
Diapositiva 1
COLOCA LA BASURA EN SU LUGAR
MARQUÉS - María Spadaro – Metodología de las ciencias sociales
Infomación Adjunta
Kein Folientitel
Kein Folientitel
Kein Folientitel
Kein Folientitel