☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Microrobot RED BULL
Viaje a las islas Fiji Cambio de hora y de fecha
Hipótesis e dos muestras
Por qué el falsacionismo de Lakatos
cuenta ECAS
10 Comunicaciones satelitales
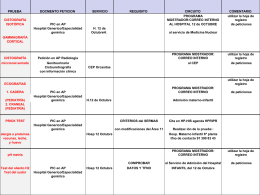
(craneal y caderas), Prick Test, Ph metrías
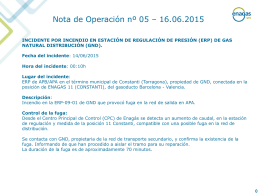
Nuevo Nota de Operación nº 5 - Junio 2015 (PPTX 842.52
HBlade - Cecauto