☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Tolerancia a Fallas en Sistemas de Tiempo Real
El cuerpo humano translúcido
File
EVALUACIÓN PREESCOLAR
Las Fallas de Valencia
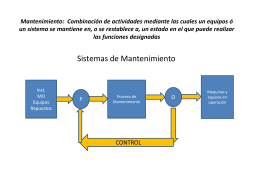
ING MANTENIMIENTO I
teoria comparación social y atribucion
Slajd 1 - SJO PWr
¿Qué hicieron otros países en desarrollo para escapar a la
guiascursos.files.wordpress.com
REPORTE DE FALLAS TÉCNICAS