☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Descriptores de forma - Departamento Lenguajes y …
TEORIA DEL COLOR - informaticabellodaniel
FINES DEL ESTADO URUGUAYO ppt
Sistemas Optpelectrónicos: Teoría del Color
teoria_del_color_informatica-julio_cesar_gomez_gayoso
taller 5 Materia :Teoría del color Alumna : Adriana Borbón Borda
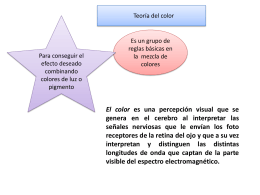
¿Que es la Teoria del color?
Todo se ha vuelto gris
Descarga
Flujos de la Comunicación
Color v002 - Mostrar información del servicio
Slide 1
teoriadelcolor_presentacionapoyo
Document
Document