☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
T2-Procesos
Procesos
Descargar Itinerario
Reglas de Ziegler-Nichols para sintonizar controladores PID
Condición de la Infraestructura Urbana en Santo Domingo ¿Un
06ControlProcesos
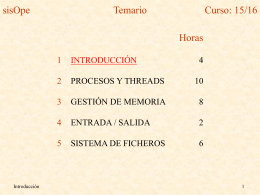
Introducción
Contenido del Diagrama de Actividad
Documentos técnicos del proyecto
Capitulo3
Señales ()