☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Solución
Diapositiva 1
Fisica Caìda Libre
¿Qué ocurre cuando la velocidad cambia?
clase 3(mrua)
caida libre y lanzamiento vertical
EL MOVIMIENTO Y SUS CAUSAS
PREPARACIÓN DE LA MUESTRA
UD 1: Cinemática
Cuestiones tema 2
¿Qué argumentos justifican que los estudiantes tengan que
Versión PowerPoint
Document
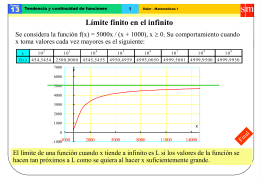
límite al infinito
Tendencia y continuidad