☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Introducción al RADAR
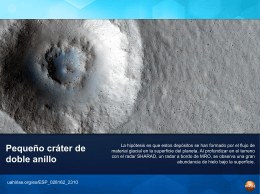
Pequeño cráter de doble anillo
No Slide Title
No Slide Title
Método del radar
Document
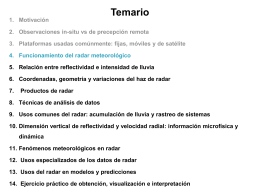
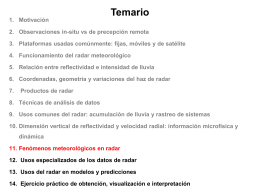
Motivacion
Radar meteorológico
Los cazadores de tornados
Descargar
Descargar Presentación
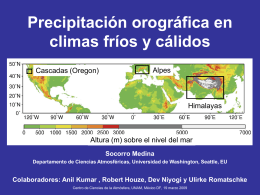
Motivacion - UW Atmospheric Sciences
Radar de Detección
¿Como determina el radar la intensidad del blanco
Slide 1
Miembros - Universidad Tecnológica de Pereira
GANZ - RadarVision
movimientos en masa
Tipo A
ANALISIS DE MORFOESTRUCUTRAS EN IMÁGENES RADAR,
Motivacion - UW Atmospheric Sciences
Sistemas de Información Seguros
¿Qué está pasando?