☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
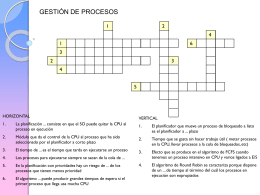
PLANIFICACIÓN DE PROCESOS-b
Diapositiva 1
Sistemas Operativos: Procesos y Planificación
FUNCIONAMIENTO INTERNO DEL ORDENADOR
Conceptos generales de software - Universidad Centroccidental
Descarga
Arquitectura
4= 6.5 MILISEGUNDOS.
MEMORIAS
EjemplosCiclos
Dispositivos de Entrada/Salida
ALGORITMO FLOYD WARSHALL