☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slide 1 - licimep.org
MANERAS-DE-PENSAR-5
Resolución angular del ojo humano
CENTRO DE GRAVEDAD
Document
Rotación Alrededor de un Punto Fijo
Estructura Fina, Hiperfina y Observaciones del Efecto Zeeman en la
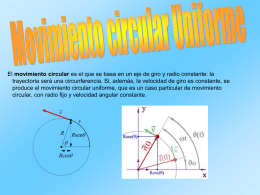
Movimiento circular Uniforme
Cinemática Rotacional (cantidades escalares y
momentum angular - ensmafisica2012
Descarga
La estructura fina del átomo de hidrógeno
Descarga