☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
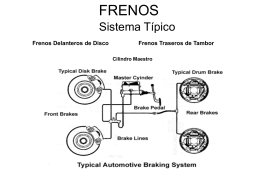
Frenado
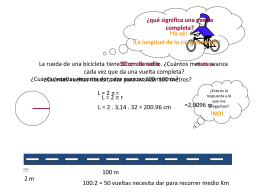
Estudio del movimiento
Folleto Inverter i500
Folleto MFC.pub - CT Automatismos y Procesos SL
Descarga
ANEXO (Trabajo para descargar Powerpoint)
DISEÑO DE UN FRENO MECÁNICO PARA UN TELEFÉRICO
PowerPoint
DINÁMICA DE VEHÍCULOS
Slide 1
Realizar ejercicio físico
Frenos ABS - semana
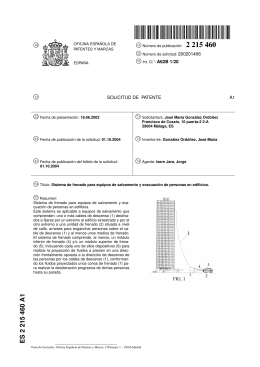
sistema de frenado para equipos de salvamento y
Análisis de varianza
Norma 29 CFR 1910.147 - Gregory & Appel Insurance
FRENOS - Webnode
Bloqueo y etiquetado
Defensive Driving
SUGERENCIAS PARA LA INTERACCIÓN
ejes-1 - Docentes.unal.edu.co
problemas redondos
Conceptos Defensivos - Club del Entrenador
direccion asistida electricamente y sistema esp