☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Comida
filtro promedio aritmético - Departamento de Ciencias de la
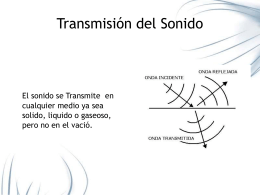
Transmisión del Sonido
3 Filtros del chisme
EL TRIPLE FILTRO - PowerPoints .org
El triple filtro
PLANTA BIOFÍSICA DE TRATAMIENTO DE AGUAS DE SAN B0RJA
las consecuencias de traen el uso de los audifonos
Ruidos Cardiacos
sesion 30
Cambio de aceite
RUIDO EN EL LUGAR DE TRABAJO