☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
sistemas de ecuaciones
Sistemas de Ecuaciones Lineales
Determinantes
Álgebra_ecuaciones 1º GRADO
Document
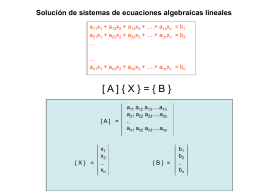
Solución de sistemas de ecuaciones algebraicas lineales
Unidad 9: Derivadas
matem EGB y Poli
Slide 1
Cómo Responder Preguntas de Prueba
Representación en espacio de estado
CLASE 4. Sistemas_de_Ecuaciones_2X2
Hipotesis generales Resistencia
Descargar GRATIS 100 Ejercicios de
Diagramas de esfuerzos normales, cortantes y momentos flectores.
x - Colegio Cooperativa San Saturio
CLASE 4(Movimientos verticales y relativos)
trabajo Práctico Nº 7