☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
direccion asistida electricamente y sistema esp
09.- LA VELOCIDAD
Conductores – recomendaciones
Company vehicle safety
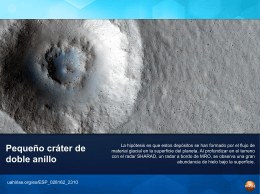
Pequeño cráter de doble anillo
Cambio de características vehiculares
Señalización óptica y alumbrado
Presentación de PowerPoint
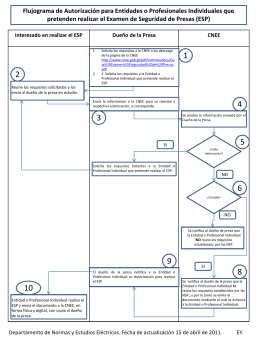
Flujo de autorización para ESP
proyecto Vehículo eléctrico
Coche
Slide 1 - Safesurg.org
Transporte Sustancias Peligrosas
notasTorrejon
que debe saber un transportista
total - fenalter
El Buen Conductor envia
LA PROTECCION AL RADON EN EDIFICIOS DE
Cinturn de Seguridad (1)
CUANTO NOS CUESTA TENER MALOS PAVIMENTOS ?
SUGERENCIAS PARA LA INTERACCIÓN
Trabajos en grupos
Ejemplo