☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Análisis de tensiones.
Topic 4 – Forces, Loads and Stresses
Chapter 6 Section 3,4 Bending Deformation, Strain
ME 315 Stress Analysis (3-0-3) (lecture hr/wk
Introduction
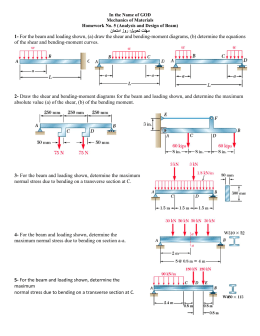
1- For the beam and loading shown, (a) draw the shear and bending
Engineering Mechanics: Statics in SI Units, 12e
Lecture 7
structural steel design is : 800 - 2007
Release Notes MERLIN-DASH July 2016 Input (see attachment item
CH 9: Design of Permanent Joints
Diapositiva 1
6 - WordPress.com
Shear and Moment Diagrams
Printable PDF of this presentation
Redesign of a Tree Shear - Biosystems and Agricultural Engineering
PROPERTIES RELATED TO STRENGTH
2003 UGM: OrcaFlex DLL (OrcFxAPI)
Christian Thomsen