☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
vectores
Diapositiva 1
CENTRO DE GRAVEDAD
MOVIMIENTO CIRCULAR
TIPOS DE MOVIMIENTO
Document
MULTIVERSIDAD VERACRUZ
Descarga
Diapositiva 1
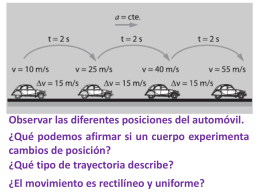
MOVIMIENTO UNIFORMEMENTE ACELERADO
Diapositiva 1
Slide 1