☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
6.870 Object Recognition and Scene Understanding
Response Journal 4: Description In “The Chase,” Annie Dillard
Tuck Everlasting Project – Due October 5th Choose 1 activity from
The Crucible: Act 2, Scene 2
Bring Language Learning to Life with All Five Senses
Customer Service - Nova Scotia Department of Education
ElementsofDrama
COMPANY OFFICER – IFSTA CURRICULUM
Family Forms - Utah Education Network
Open Scene Graph Overview
Unlocking Themes in Macbeth
Discourse and Pragmatics - City University of Hong Kong
DISNEY`S TEST TRACK
Customer Retention Customer Experience Audit Solve …
FENCES: ACT 2 STUDY GUIDE ENGLISH 11A: FALL 2006
Julius Caesar, Act III
RFID at Multnomah County Library - 福建省图书馆--首页
Setting The main purpose of a setting in our writing is to establish a
The Hero`s Journey
Creating Scenes - Collin College
Literary Elements of Julius Caesar
Literary Elements of Julius Caesar
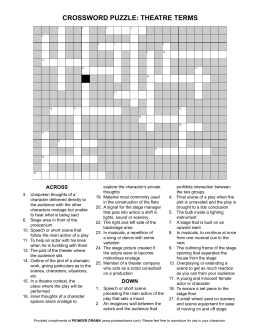
crossword puzzle: theatre terms