☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Inteligencia Artificial Aplicada a Robotica Movil
Diapositiva 1 - OAS :: Department of Conferences and
Introducción a la Fe Cristiana
EL SISTEMA INTERAMERICANO DE DERECHOS …
El Ministerio Infantil para el Nuevo Milenio
: Cursos, Jornadas y Seminarios > Departamento de …
Diapositiva 1
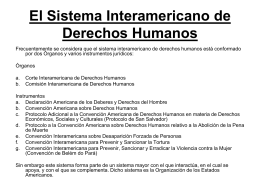
DERECHOS HUMANOS DE LAS MUJERES
MAQUINAS DEL FUTURO - Sitio Web de ieRed
Seminario-Taller sobre los Derechos Humanos de la
Clase de matematicas