☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Overview of Graph Theory
Chapter 12 Routing
emulab.net: A Network Emulation and Distributed Systems
A Comparative Study between Bellman-Ford Algorithm
Priority Queue - Cornell University
Introduction to Programming the WWW I
Chapter 12
Slide 1
Chapter 12 Network Flow Models
Greenplum Overview - Stanford University
Slide 1
No Slide Title
Week 7 notes
Document
Document
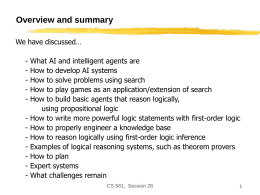
CS 561a: Introduction to Artificial Intelligence
Network Reprogramming - University at Buffalo
Designing Incentive Routing and Forwarding Protocols in Wireless
Emergent Systems - Indian Institute of Technology …
dest - Moodle
Fast Monte-Carlo Algorithms for Matrix Multiplication
Spatial Networks - University of Minnesota
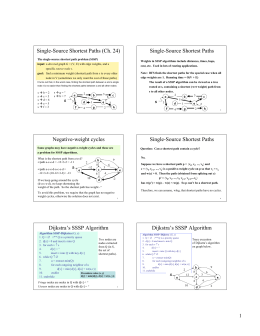
Single-Source Shortest Paths