☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
DISTRIBUTED COMPUTING
DISTRIBUTED COMPUTING
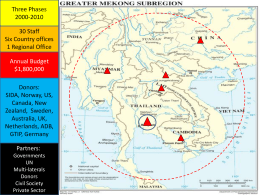
United Nations Inter-agency Project on Human Trafficking
AFRICAN AMERICAN WOMEN
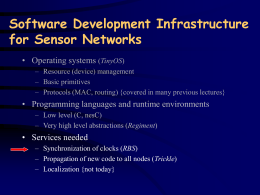
Fine-Grained Network Time Sync using Reference Broadcasts
Slide 1
Document
Lecture 1 - Computer Science
Chapter 12
Cluster-Aware Updating and the New Generation of WSUS