☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Introduction To Erlang
Small is Beautiful
Life is too short for imperative programming”
Hello, World!
Document
Document
ecug.googlecode.com
Lecture 3
www.erlang.se
Efficient Resource Sharing in Concurrent Error Detecting
Concurrent Functional Programming with Erlang and …
The Cellular Concept – System Design Fundamentals
ppt - Ericsson Erlang/OTP
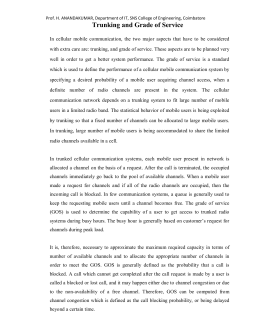
Trunking and Grade of Service
Commercial Applications of Multi
No Slide Title
Hello, World! - University of Pennsylvania
History of An(cad)emic Progress of English Language
Document
ICWall Tiled display for Education and Visualization
Document
Programming Language Technology 2005-6
XMerL- Interfacing XML and Erlang