☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
www.fceia.unr.edu.ar
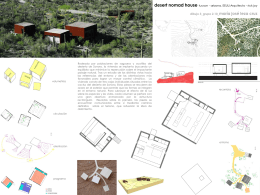
HOTEL BALNEARIO
Diapositiva 1
Vistas de objetos 3D
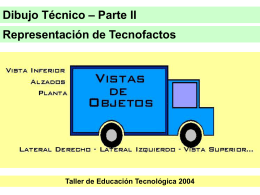
Vistas de Objetos
Diapositiva 1
Diapositiva 1
Vistas de Europa desde el cielo
PEÑAS NEGRAS
ISO/IEC 9126”
NAVALGUIJO 2012