☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Clocked Mazurkiewicz Traces and Partial Order …
Document
Tree Automata - The Blavatnik School of Computer Science
Slide 1
Document
CPT S 223: Advanced Data Structures
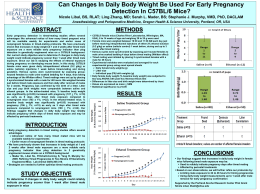
AALAS-2010-Poster-Libal - Oregon Health & Science University
Formal Languages and Automata Theory
No Slide Title
Document
Complexity and Computability Theory I