☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Esquema de la Unidad
CLASES DE MÁQUINAS SIMPLES
Edwin Fabián Parada Arévalo Jeimy Catherine pardo
Diapositiva 0
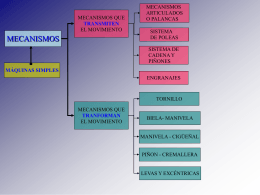
Mecanismos 2 - WEB TECNOLOGIA ESTUARIA
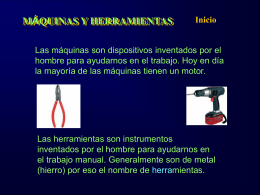
maquinas-y-herramientas1
Maquinas Simples - sciencesaintpaul
Diapositiva 1
ESTRUCTURA DE LOS MATERIALES. PROPIEDADES Y …
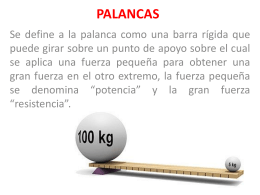
PALANCAS - WordPress.com
La polea