☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Chapter
Chapter
Introduction to Computer Architecture
Floating Point (a brief look)
Computer Organization CS224
Simple Banner
CSE 431. Computer Architecture
Computing Software Basics
Chapter
CPSC 321 Computer Architecture
8 September - Computer Science
C++ Program Design 3rd Edition
MIPS Instruction Set Architecture
Slide 1
CS61C - Lecture 13
Lec11: RISC, CISC, and Assemblers
CS61C - Lecture 13
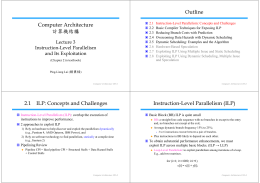
Chapter 3_Instruction-Level Parallelism and Its Exploitation