☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Document
Document
emulab.net: A Network Emulation and Distributed Systems
Greenplum Overview - Stanford University
Communication - Princeton University Computer Science
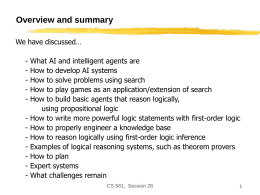
CS 561a: Introduction to Artificial Intelligence
Languages and Finite Automata
Emergent Systems - Indian Institute of Technology …
Cluster-Aware Updating and the New Generation of WSUS
Critical Facts
Maintaining the Illusion of Global Control