☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Conclusiones - MaRTE OS - Universidad de Cantabria
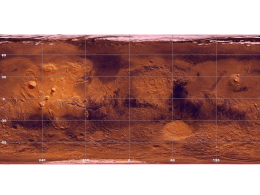
La superficie de Marte - ieso canal de castilla
presentación en PowerPoint
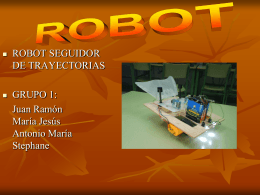
ROBOT
W6 Español
Marte - WordPress.com
E3c y E6 Español