☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Formation TANGO
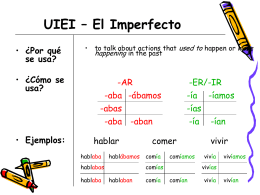
imperfect
¿El pretérito o el imperfecto?
Etapa Preliminar – El Presente
GIVING EXPLANATIONS
El Imperfecto - DouglasCountyForeignLanguage
Slide 1
imperfect
Yo - School District 27J
El pretérito imperfecto
The Imperfect - OnMyCalendar
Introduction