☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Slajd 1
Introduction to Programming
Intro to SC07 Fortran@50 Panel
Protection and Security Security Goals and Principles Protection and
Programming Language Theory - Personal Pages
Document
Protection and Security Security Goals and Principles
ENGR2216 FORTRAN PROGRAMMING FOR ENGINEERS
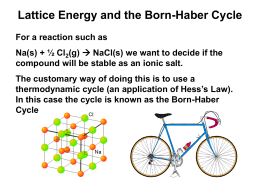
Lattice Energy and the Born-Haber Cycle
Networking for Embedded Systems
Document
Slide 1
Leaps and Time Bounds
Salford FTN95 for .NET Framework
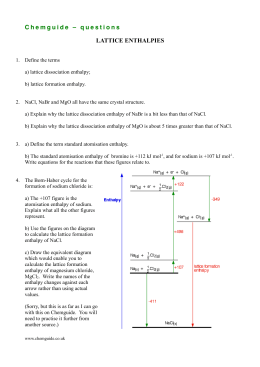
Chemguide – questions LATTICE ENTHALPIES
Document
FORTRAN 77 - Murray State University
ch2 - Computer and Information Science
week 1
The History of Programming Languages
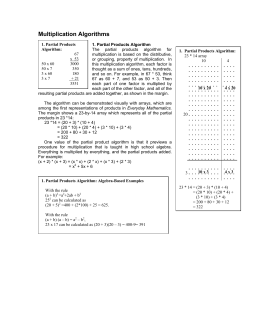
Multiplication Algorithms
PowerPoint Presentation - 12.010 Computational Methods …
Care and Prevention of Athletic Injuries