☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Languages and Finite Automata
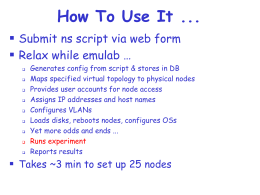
emulab.net: A Network Emulation and Distributed Systems
Chapter 12
Greenplum Overview - Stanford University
CS 561a: Introduction to Artificial Intelligence
Critical Facts
Maintaining the Illusion of Global Control
Emergent Systems - Indian Institute of Technology …
Advanced pointer topics
Slide 0
XPath Presentation
The Million Book Project The Mini
Document
DATABASE SYSTEMS
Linear Programming (Optimization)
IMDS Rele0ase 7.0 and next changes