☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Components
Artificial Intelligence & Robotics
PPT - Ankit Jain
CS 415 – A.I.
Automated Systems
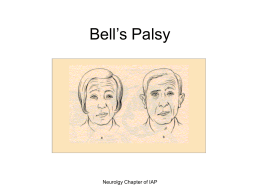
Bell`s Palsy - iap neurology
CS 415 – A.I.
Strong Poster Presentation Examples
Test Slide
Standard Grade Computing
Document
Artificial Intelligence “339-7”
Slide 1 - PosterBuzz
Odor Tracking with an Electronic Nose
Algoritma dan Perancangan Robot Industri
יכולות נבונות Telerobotic Features
Document
ROBOTC for IFI - FIRST - Portland State University
Robotran: A programming environment for novices in …
Robotics - Purchase College Faculty Web Server
Document
INDUSTRIAL ROBOTICS
传感器网络及应急指挥系统在煤矿中的应用