☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Cyber Physical Systems - Institute for Software Integrated
Job Title Employer/ Agency Job Description Qualifications Salary
Introduction to Cyber Physical Systems - Home
National CPS Board www.cpsboard.org www.twitter.com/ncpsb
Document
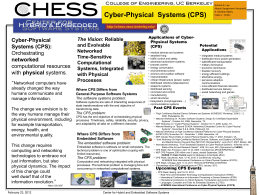
Cyber-Physical Systems (CPS)
GME Summary - Vanderbilt University
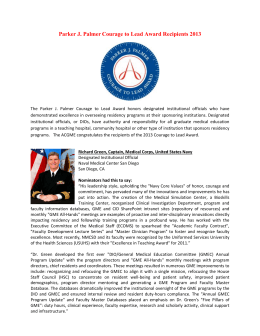
Parker J. Palmer Courage to Lead Award Recipients 2013
Slide 1
Using CPS with GradeSpeed.NET
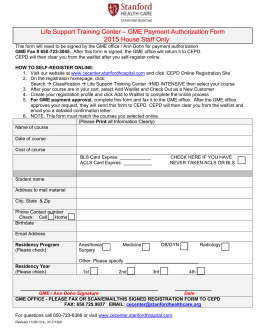
Life Support Training Center – GME Payment Authorization Form
Compiling with Continuations, Continued
Using analytics to thwart the child protective services talent crisis
Document
Slide 1
Metode nucleu (kernel) - Universitatea din Bucuresti
eInstruction Notes
Cyber Physical Systems: Design Challenges
Instructor Set
Slide 1
The Symbolic vs Subsymbolic Debate
RESULTADOS GENERALES DE AYER EN LA PLATA
Resultados generales de ayer en San Isidro