☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
TRANSFORMACIONES LINEALES
Transformaciones 2
Unidad I: La Bases del Mundo Moderno
Diapositiva 1
Diapositiva 1
(logotipo de eroski)
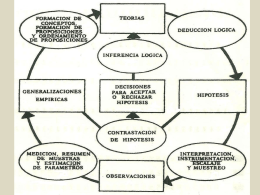
Actividad compartida Inferencias Ciclo de Wallace
Coordenadas cromaticas
Diapositiva 1
EJERCICIO 4
Diapositiva 1
Diapositiva 1
Manual de instrucciones