☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Procesamiento de los registros
www.gedeth.com
METO001
75 proyectos industriales por 377 millones de dólares
Propuesta del CES Valencia
Sin título de diapositiva
evolución plan sarbide - Gipuzkoako Foru Aldundia
Diapositiva 1 - MI OTRA CLASE DE HISTORIA
The South American Market
Sin título de diapositiva
Diapositiva 1
tema8_inteligencia
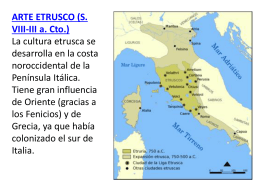
Arte romano
DGO
Información MIR para extranjeros.
Diapositiva 1 - La Verdadera Magnitud
Diapositiva 1 - La Verdadera Magnitud
TEMA 8CONSTITUCIÓN, ELEMENTOS Y EFECTOS DE LA
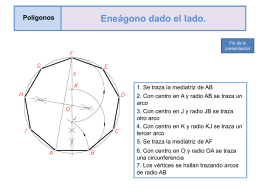
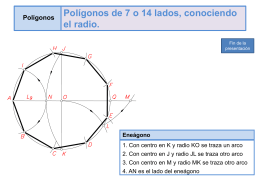
12. Eneágono dado el lado
PARTE II EL CONTRATO DE TRABAJO. TEMA 6 EL …
Diapositiva 1 - La Verdadera Magnitud
TEMA 9.
TEMA 9.