☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
UNIVERSIDAD DE COSTA RICA
BALIZAS AUTONOMAS LED.indd
Tema: Como funciona el mundo IB theme: How the world …
Diapositiva 1
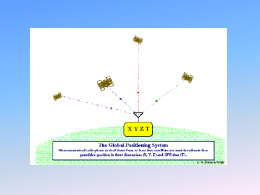
2.1 El Gozne De Los GPs
¿Quiénes somos? - Divine Revelations
Proyecto final
formación en la empresa
Diapositiva 1 - Seccionseis’s Weblog
Actividad de apertura
PROGRAMA DFD. - www.colegioscolombia.com
Diapositiva 1 - Belleza Integral
Diapositiva 1