☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Informatika
Document
Global Good Samaritans: Human rights foreign policy
SC34 Status Report 1999
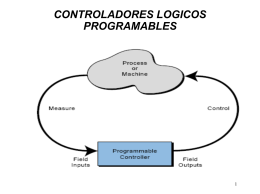
PLC BASICO 1 - Repositorio Digital EPN
MODELOS EN COMPATIBILIDAD ELECTROMAGNETICA
HMI Peer Review - Stanford University
Testing Techniques
Module 10
No Slide Title
Chapter 1: The Nature of Information Technology Projects
Chapter #8: Finite State Machine Design Contemporary …
Introduction to Programmable Logic Controller(PLC)
PLC in Automatic Control
P 3-4