☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Lecture 2: Software Platforms
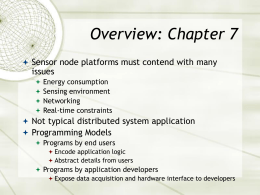
Overview: Chapter 7
The nesC Language: A Holistic Approach to Networked
Using Your International SOS Program
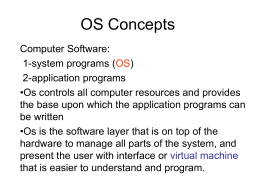
Os Concepts - Ryerson University
TinyOS Tutorial - Peng Ning @ NC State University
Tips for Public Speaking - Woodland Hills School District
TinyOS Tutorial
The nesc Language: A Holistic Approach to Networked
Document
.Net Developer Technologies
HEALTH MATE - Ohio State University
MicroHash: An efficient Index Structure for Wireless
TinyOS tutorial
SMART meeting - Seattle Robotics
TinyOS tutorial - University of Notre Dame
Programming Languages for Motes
Odor Tracking with an Electronic Nose
Smart Dust and TinyOS: Hardware and Software for …
Dynamic Complexity in System of Systems
ESIDE: An Integrated Development Environment for …
INCOSE MBSE System of Systems (SoS) Activity Update
CSE P 505: Programming Languages