☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Characters and Strings
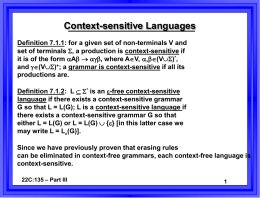
Context-sensitive Languages
Chapter 6
CS 2130 - Georgia Tech
Catholic University of America
Regular Languages and Expressions
Slides for Rosen, 5th edition
Chapter #8: Finite State Machine Design Contemporary …
Linear Systems and Control
Using Probabilistic Finite Automata to Simulate Hourly
Lecture 8 Memory Elements and Clocking
Languages and Finite Automata
Languages and Finite Automata
Languages and Finite Automata