☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Odor Tracking with an Electronic Nose
Autonomous Navigation Workshop
Trinity College Fire Fighting Robot Contest
CS 415 – A.I.
Automated Systems
CS 415 – A.I.
ROBOTC for IFI - FIRST - Portland State University
Robotics - Purchase College Faculty Web Server
Test Slide
Components
Electronic Components (cont.)
Document
Odor Control - Lemmens Shardlow
INDUSTRIAL ROBOTICS
יכולות נבונות Telerobotic Features
Proposal for a Guide Robot for MCECS
Document
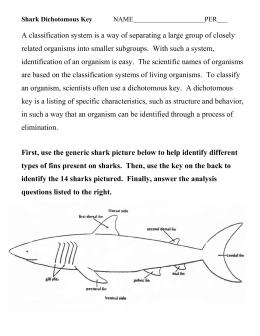
shark dichotomous key packet
Robots
Document
Computer Programming with Robots
Tapestry – Chapter 3
Robotics