☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Fault Tolerance - University of Georgia
Fault Tolerance
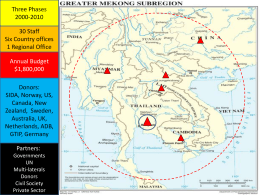
United Nations Inter-agency Project on Human Trafficking
Lecture6
chen-07
Diapositiva 1 - Instytut Telekomunikacji
05-Contract-Signing Protocols
OWEN/NERO Bandwidth Audit
Slide 1
Intro to Information Systems
VOTING RIGHTS
Document
Direct Observation - UW Courses Web Server
DISTRIBUTED COMPUTING
The Road to Windows 7
Schedule Monday, April 26, 2010
Slide 1
Formal Models for Distributed Negotiations: Transactions
Ethnography - UCLA Department of Information Studies
Document