☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
[Sample Course Title Slide Insert Presentation Title]
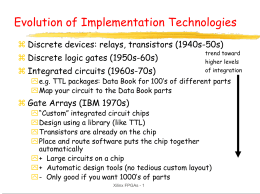
Evolution of implementation technologies
901320 Computer Architecture Chapter 1 Objectives
Document
hgfjh
Pentium and PowerPC Data Types
CS151: Introduction and Five Components of a Computer
Building Cross Platform Mobile Apps Powered by Azure
Nallatech Powerpoint Template White