☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Poster1 - klabs.org
Document
Number System Review - Mississippi State
The Verilog Hardware Description Language
Introduction - University of California, Berkeley
Lecture 8 Memory Elements and Clocking
Document
LIFT: A Low-Overhead Practical Information Flow …
Slide 1
www.eng.utoledo.edu
EEL4930/5934 Reconfigurable Computing
Slide 1
Software Testing (introduction)
Introduction - University of California, Berkeley
Preventive Maintenance
370 lecture - UWEC Computer Science Department
MUGNor: Faster, safer and cheaper FPGA development
FRENZY
Chapter #8: Finite State Machine Design Contemporary …
FRENZY - cffquakers
Diapositiva 1 - U. E. Agustín Armario | Liceo
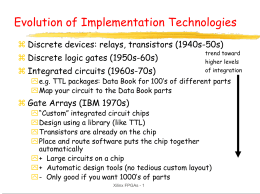
Evolution of implementation technologies
Comparison of IE Survey